Coordinated Drone Flying
As part of a project led by the Citi research laboratory in collaboration with my department, I had the opportunity to experiment with coordinated drone flying, also known as 'flocking'. The goal of this project was to make several drones fly simultaneously while controlling them autonomously through a pre-developed algorithm.
Making multiple drones fly simultaneously while autonomously preventing collisions.
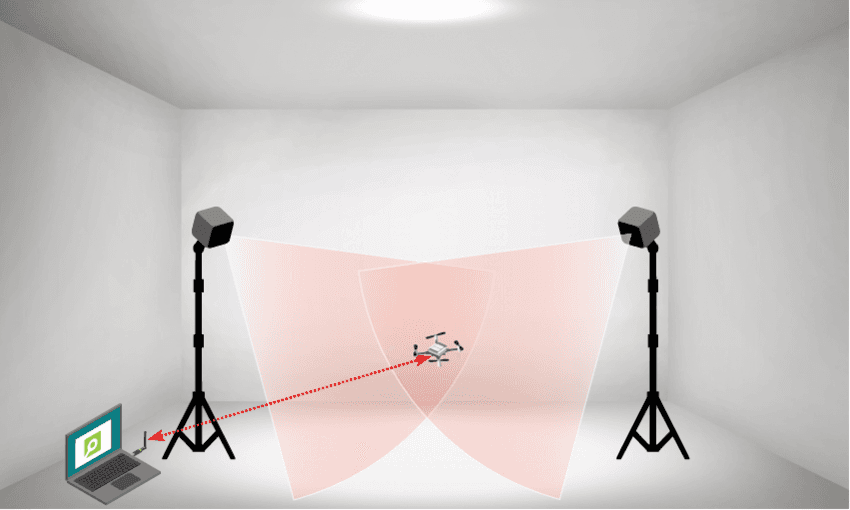
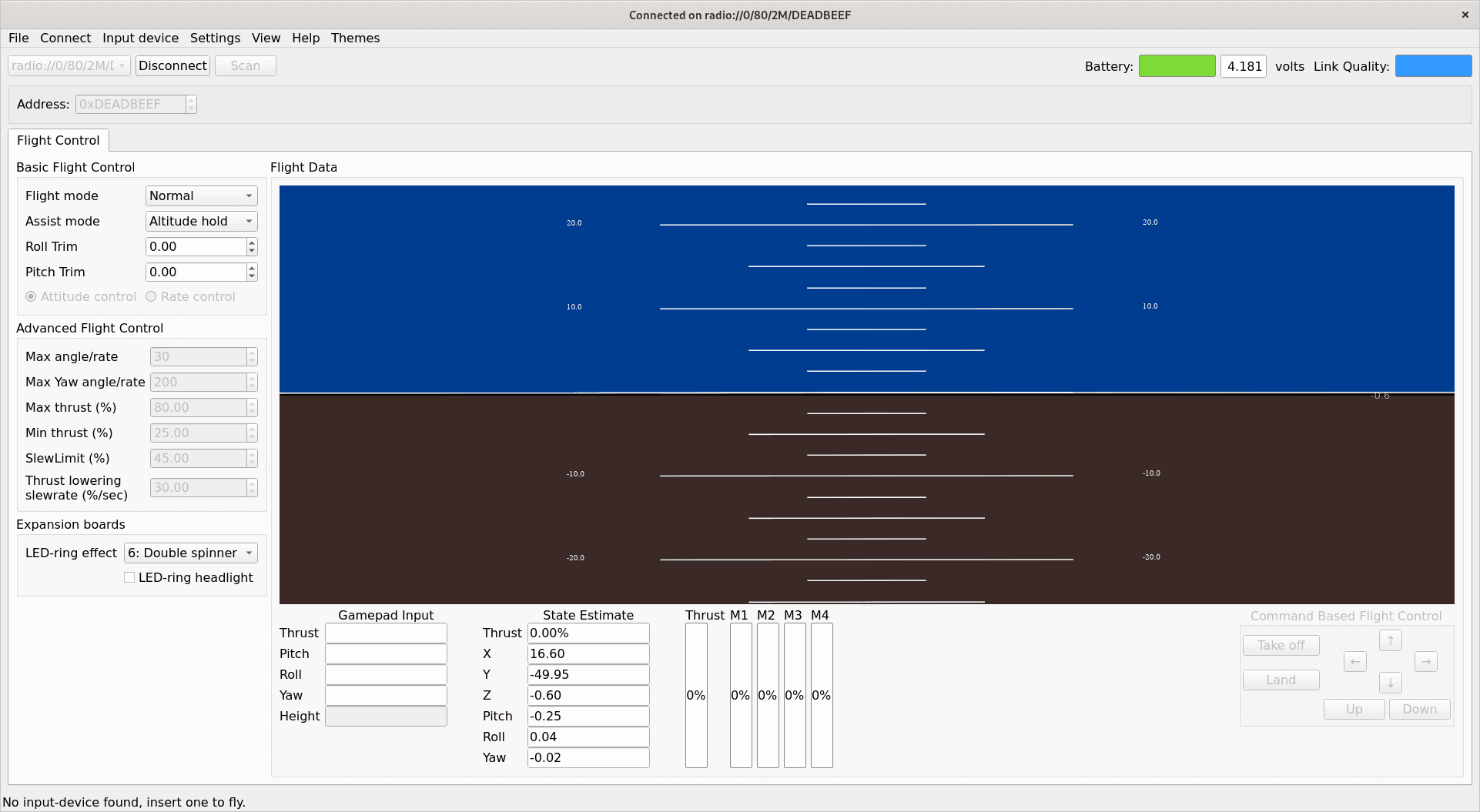
Using infrared-based localization technology (Lighthouse System), we were able to track the exact position of each drone in real time. By combining these data, we could then adjust the drones’ trajectories dynamically via Python to prevent any collisions between them and execute elegant coordinated path flows.
Integrating real-time infrared localization coordinates to dynamically adjust trajectories.
Visuals & Video Examples


Tech Stack
Hardware

Software
Documentation
Other Projects



Want to Connect?